The SLIM probe made Japan the fifth country to softly reach the lunar surface and cease communication soon after.
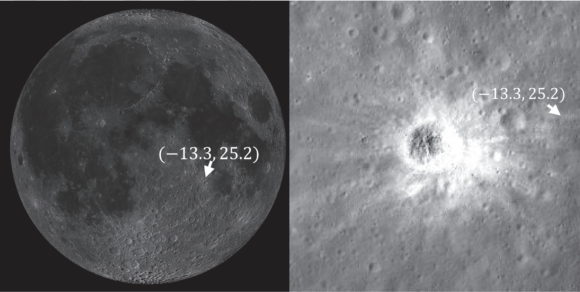
The moon curse continues to affect space missions, albeit unevenly. After the failure of the American lunar module Peregrine PM-1, it was the turn of the small Japanese probe SLIM from Japan to reach the lunar surface. And he achieved it… more or less. On January 19, 2024, at 15:20 UTC, the SLIM probe softly landed on the lunar surface near Scioli Crater (13.30 degrees S, 25.23 degrees E), making Japan the fifth country to accomplish this feat and the third in this plan. century after China and India. Unfortunately, something went wrong during landing and, once on the surface, the solar panels were unable to generate enough electricity to keep the ship operational. SLIM stopped broadcasting at approximately 18:00 UTC when its batteries died after just two and a half hours on the surface. It is believed to be currently in a state of hibernation (safe mode). The small robots LEV-1 and LEV-2 were successfully deployed at a height of 1.8 meters and are known to be the first to successfully transmit telemetry (LEV-2 had to communicate through LEV-1). The Japanese space agency JAXA has not yet announced the cause of the accident or published possible photographs taken by the probe’s cameras during descent and landing. We know that the probe landed with 43.7 kg of fuel in its tanks.

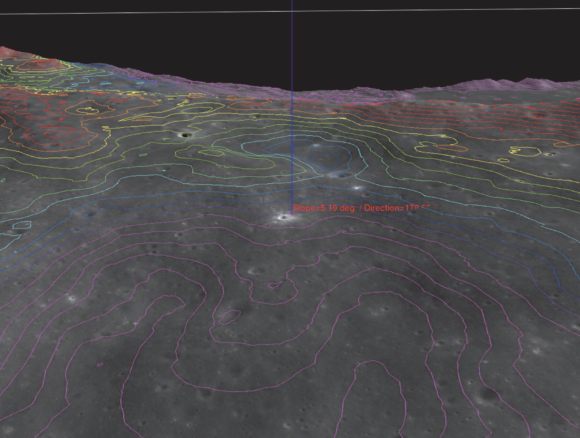
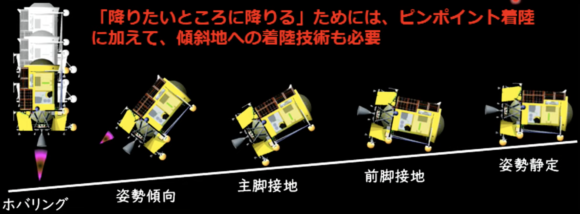
It is unknown what may have happened to the probe and its electrical system, especially since the panels worked perfectly for several months before the moon landing, but all indications are that the probe was left in a position that prevented the panels from being illuminated. Let’s remember that SLIM had to land in a curious two-step maneuver: after surfacing vertically, it had to turn almost 90° to land smoothly horizontally at a 15° tilt, something no ship had ever done (and, we saw what we saw, perhaps no one else will try). It’s possible that this maneuver caused the probe to fall on its side or end up upside down – or the local slope had a completely different slope than the planned 15° – leaving the solar panels on top in the shadow, but, at this point, this is all speculation. Analyzing the fate of the probe based on models of the ship seen in the telemetry should be treated with great caution, since the connection between the reconstruction of the telemetry and reality is not always direct (in these reconstructions the probe is seen pointing its nose towards the ground). It’s also possible that the probe was damaged during landing, or that the flexible solar panels secured with Velcro became loose or shifted in some way. In any case, if it’s an orientation issue, the Sun is getting higher in the Scioli area, and since there are fewer shadows, perhaps the batteries will be able to charge again. We’ll see in the coming days whether SLIM can be revived before the icy moonlit night sets in (SLIM isn’t designed to survive a two-week night anyway).


This is how the Japanese SLIM probe will land on the Moon tomorrow, the 19th, at 15:20 UTC. pic.twitter.com/db8fJumqVK
— Daniel Marin (@Eurekablog) January 18, 2024
It makes sense that JAXA insists that SLIM, which is still a relatively cheap experimental probe for testing new navigation technologies during landing, has successfully completed its mission. But it is inevitable that this success will have a bitter aftertaste for now. Unlike China, India and others that have been trying to reach the Moon in recent years, Japan has a consolidated lunar program dating back to the Hiten probe launched in 1993. Despite everything, Japan saw China – three times! – and India. ahead of them in this particular Asian race for the lunar surface. Additionally, SLIM’s “Schrödinger landing” occurred after the failure of the small Omotenashi satellite and its subprobe, which was launched in November 2022 as part of the Artemis I mission, and failed to reach the lunar surface as planned (admittedly, it was a very risky low height). -the cost of the mission, but it failed its main task, although, logically, JAXA tiptoed around this matter and almost no one remembers about this probe). In addition, we cannot forget the accident of the lunar module HAKUTO-R of the Japanese company ispace, which crashed on April 25, 2023. Although this was a private mission not associated with JAXA or ISAS, there is no doubt that it was a blow – for better not to say – to the Japanese space program.

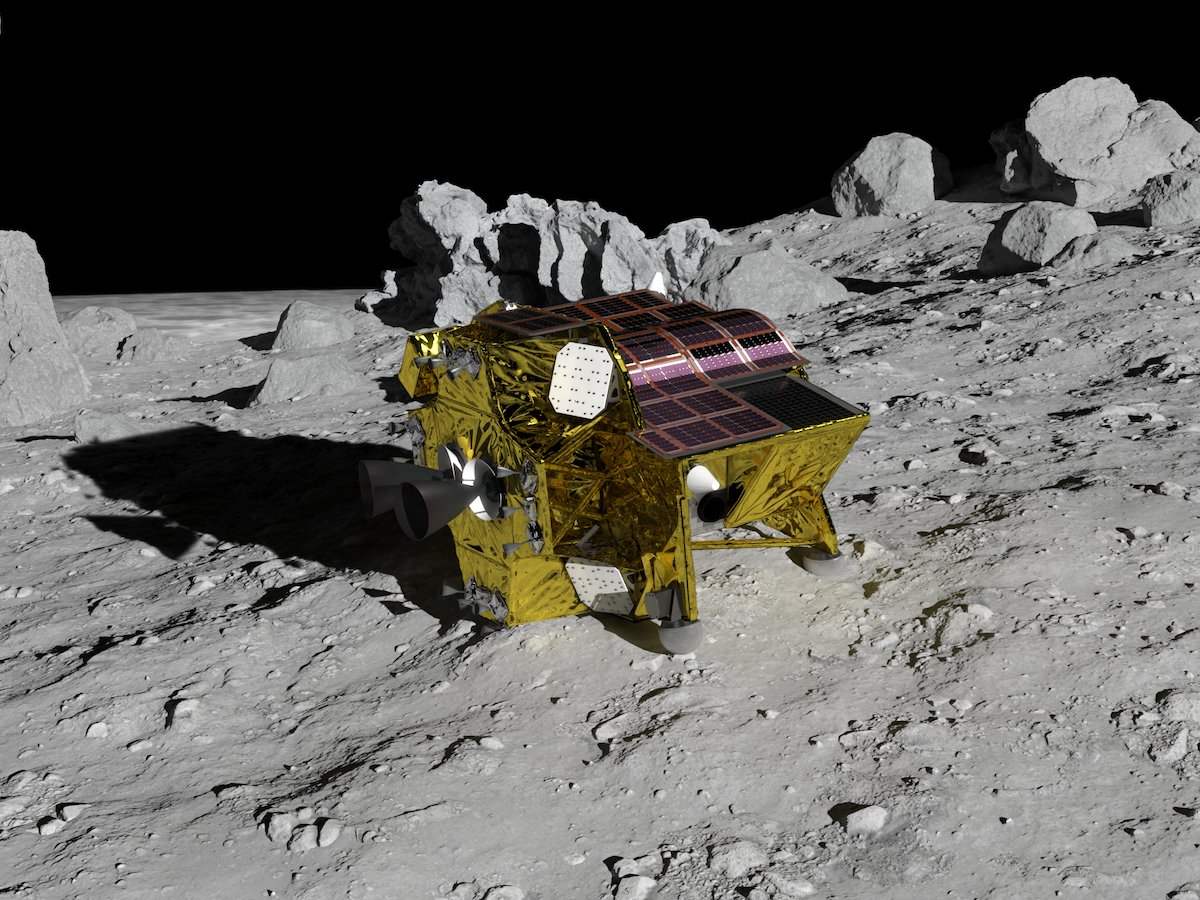
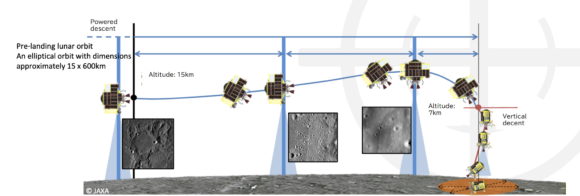
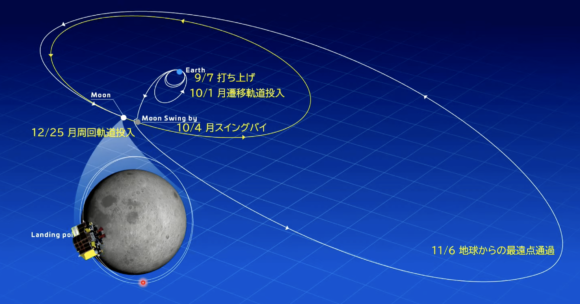
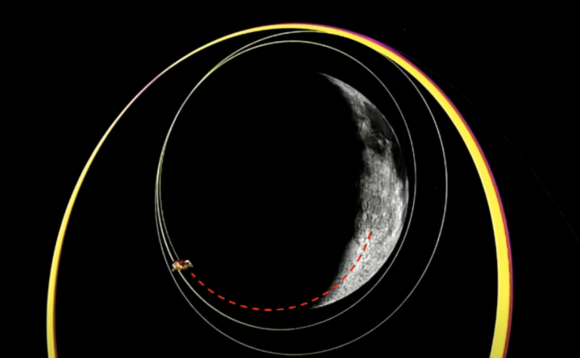
SLIM (Smart lander for lunar exploration(スリム or 小型月着陸実証機 in Japanese) was launched on September 6, 2023 from the Tanegashima Launch Center on the H2A 202 rocket of the F47 mission in conjunction with the X-ray observatory XRISM. H-IIA placed the probe into a highly elliptical orbit of 340 x 100,000 kilometers and an inclination of 30.3°, and then on September 30, the probe used its propulsion system to enter a low-energy trajectory towards the Moon. On October 4, it flew past the Moon to enter a wider orbit that took it to an altitude of 1.37 million kilometers from Earth on November 6. On December 25, it was launched into an elliptical lunar orbit with dimensions of 600 x 4000 kilometers and an inclination of 89.8°. On January 13, 2024, it completed its orbit at an altitude of 600 kilometers, and on January 17, it turned on its engines again and reached an orbit of 150 x 600 kilometers. Finally, on January 19 at 03:40 UTC, she lowered her periastron to 15 kilometers. In this sense, it should be noted that attempts to land on the Moon from such an elliptical orbit are not common (usually an orbit of approximately 10 x 100 kilometers is used to reduce the horizontal speed as much as possible). Already in the final orbit of 15 x 600 kilometers, braking began at 15:00 UTC when passing near periastron.

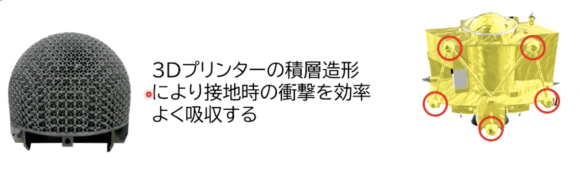
Once the optical navigation cameras identified the landing zone, at an altitude of 7 kilometers the probe changed its position to vertical to scan the area using lidar and radar. The radar, which operated at an altitude of up to 10 meters, has four beams: three lateral and one vertical. For navigation images, SLIM uses two cameras: one for the initial phase in the “horizontal” position, and the other from 7 kilometers when the ship is in a vertical position. At 50 meters above sea level, the probe stopped descending and used its optical navigation system to autonomously determine the best location to land on the Moon, a method previously successfully used by Chang’e 3, Chang’e 4 and Chang’e. e probes 5 and Chandrayaan 3—, if necessary, moving horizontally to a safe zone in the shape of a square with a side of 100 meters. The probe then continued its descent and deployed the LEV-1 and LEV-2 rovers at an altitude of 1.8 meters. He then turned off the main engine and used the auxiliary engines to tilt and fall horizontally on a slope of about 15°. Contact with the ground was softened by five legs of the compact chassis, with shock absorbers at the ends made of a hemispherical aluminum mesh made by 3D printing.
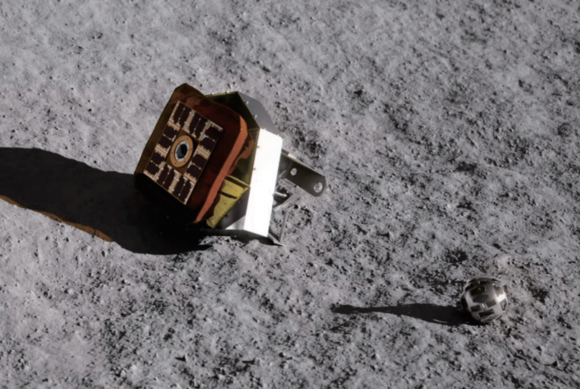
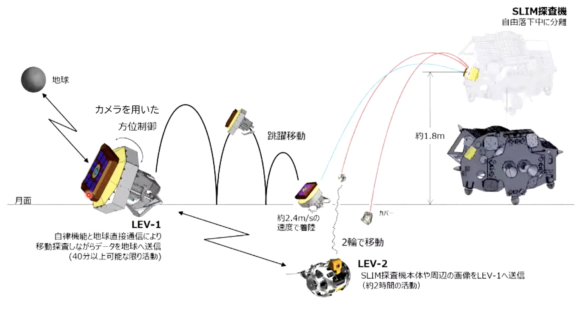
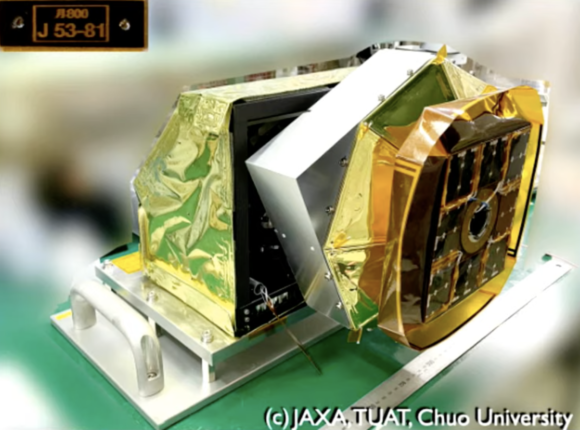


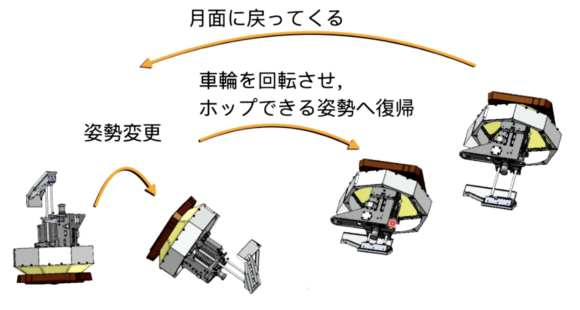
Two LEV rovers (Lunar sightseeing vehicle) are small deployable probes from JAXA. LEV-1 is a jumping robot measuring 26 x 40 x 30 centimeters and weighing 2.1 kg, which is supposed to communicate directly with the Earth and send images of the surface from a camera, and has a lifespan of 40 minutes. LEV-2 is a small spherical robot weighing 250 grams and with a diameter of 8 centimeters, which is virtually identical to SORA-Q (ソラキュー), which traveled on the ill-fated HAKUTO-R. LEV-2 must move along the surface, moving the two halves of the sphere, which act as wheels. LEV-2 is produced by JAXA in collaboration with toy company Takara-Tomy, which originally produced Transformers dolls. LEV-2 communicates with Earth through LEV-1.
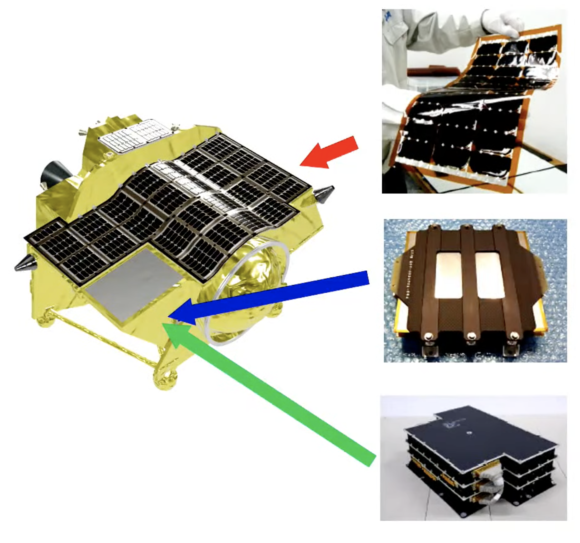

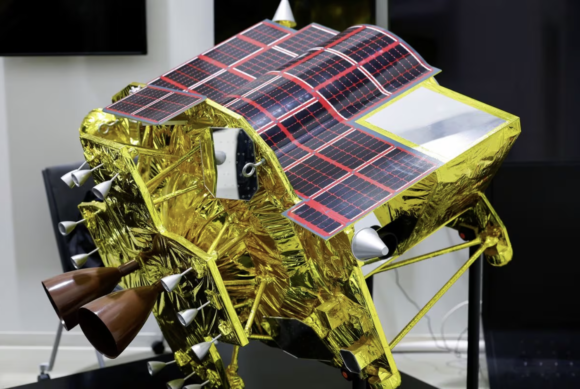
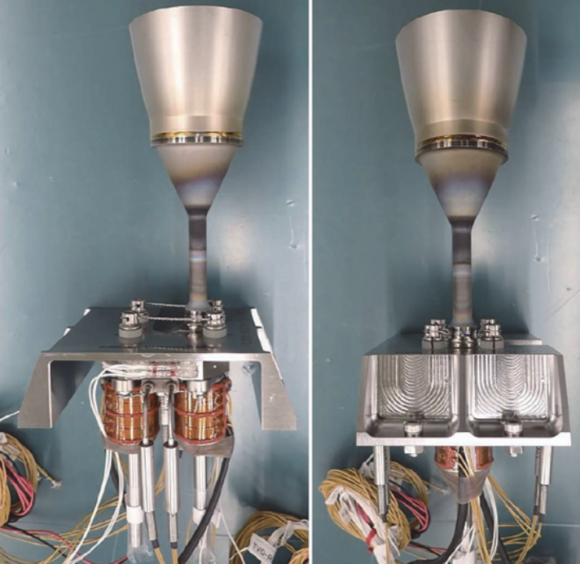
As an experimental probe, SLIM does not carry a significant scientific payload, although, in addition to the LEV robots, it includes the MBC multispectral camera and the LRA laser retroreflector supplied by NASA. In addition to this tool, NASA assisted the mission by providing access to the space agency’s Deep Space Network (DSN). SLIM had a launch weight of 730 kg (with a dry weight of 190 kg) and dimensions of 2.4 x 1.7 x 2.7 meters. It was built by Mitsubishi Electric (MELCO) for JAXA using an extremely lightweight and low-cost design. It is equipped with twelve 22 Newton traction motors from IHI and two 500 N propulsion motors from Mitsubishi (the latter equipped with ceramic nozzles), fed from a central cylindrical tank (hydrazine and nitrogen tetroxide are separated by a membrane inside the tank). The ultra-thin solar panels are flexible and are attached to the structure using modified Velcro.



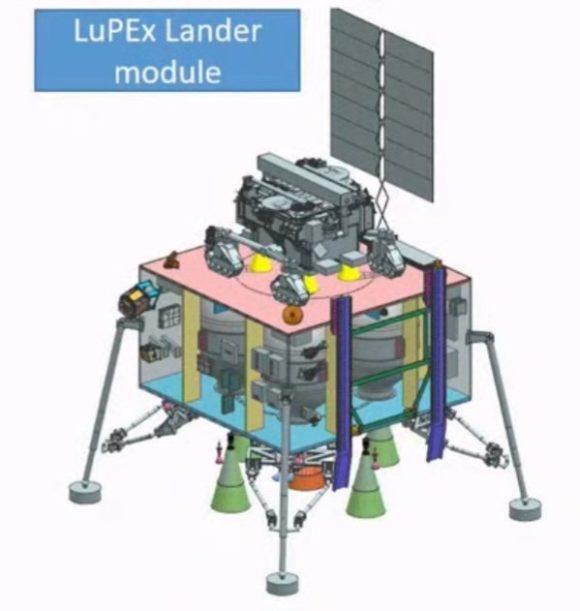
Whether SLIM is activated again or not, its development will be key to the next lunar mission LUPEX, a probe jointly developed with India in which Japan will provide various instruments and a rover to explore the moon’s south pole. SLIM follows the path of the Hiten (1993) and Kaguya (SELENE, 2007) missions, although it is the first Japanese probe designed for a soft landing on the Moon.